
Crawling: The Foundation of Locomotion
Chapter Four of Healthy Movements for Human Animals

Note: This is the fourth chapter of my serialized book Healthy Movements for Human Animals. You can find an archive of previous chapters here.
In the previous chapter, we explored how rolling challenges a fundamental postural skill: controlling the spine as it tilts, bends, and rotates. Crawling builds on that foundation by adding a new layer of complexity - coordinating spinal alignment with precise movements of the four limbs to create locomotion.
Together with squatting (covered in the next chapter), rolling and crawling form the foundation for moving with agility while close to the earth. These “ground flow” movements build the basics of overall body coordination. They fit into exercise programs as corrective work, warm-ups or brief movement snacks during the day.
Crawling is especially valuable for overall coordination because it engages our most deeply rooted movement patterns. Our ancestors spent almost 400 million years perfecting quadrupedal locomotion before learning to walk upright just 4 million years ago. Almost everything about the structure and function of human bodies - the spine, shoulders, hips, and all the major muscle groups connecting them - was originally designed for movement on four limbs, not two. Thus, walking is essentially crawling with some minor updates to the software and hardware.
This means crawling serves as an excellent “reminder” to the nervous system about how to coordinate all the major joints and muscles of the body. This may be useful to modern humans who rarely challenge themselves to move skillfully with their hands on the ground and their spine horizontal.
In this chapter, we’ll examine the evolutionary history of crawling, how it develops in human infants, and provide a series of videos demonstrating crawling exercises.
The development of crawling in infants
Human infants start trying to crawl around four months while lying on their stomachs. They wriggle and flail their limbs, but they can’t really go anywhere because their chest stays pressed to the ground.
The first breakthrough involves pushing the head and chest away from the floor with the hands and forearms. This may allow the forearms to pull the body forward in some “commando”-style crawling, with the belly on the floor and the knees splayed out to the side.
By 7-10 months, most infants progress to supporting their chest with their hands and moving their knees underneath their hips, elevating the belly away from the floor. This posture allows the classic hands and knees crawling, where the right arm works with the left knee and vice versa.
As noted in the earlier History of Movement chapter, this developmental progression has striking parallels with the evolutionary progression of quadruped locomotion in our ancestors, starting with the first creatures who emerged from the ocean 375 million years ago. It starts with a push-up by the front limbs, proceeds to reptilian-style crawling with the limbs splayed out to the sides and the belly low to the ground, and becomes far more efficient with mammalian-style locomotion, with the hands and feet directly under the shoulders and hips, the belly away from the ground, and the limbs free to swing directly forward and back under the spine.


The takeaway is that there are relatively few solutions to the problem of moving a vertebrate body with four limbs over the ground, and most of them look similar across the animal kingdom. Nearly every vertebrate animal that cannot fly carries a deep heritage of quadrupedal locomotion encoded in their DNA, and humans are no exception.
The challenge of crawling
Crawling seems simple, but it requires coordination from all the major muscles and joints connecting the shoulder and hips.
One key requirement is reciprocal limb movement, meaning the limbs move in alternation. For example, as the right hand lifts and swings forward, the left hand is pushing into the ground and extending backward. Another requirement is “cross-lateral” patterning between the arms and legs - when the right hand reaches forward, so does the left knee. This diagonal pairing ensures the body remains balanced as supporting limbs are continually removed from the ground.
The more difficult challenge is controlling the spine, which needs to be mobile enough to allow reaching, yet stable enough to avoid collapse as the body transitions its points of support. The human spine contains 24 vertebrae, each allowing motion in multiple directions - flexion, extension, lateral bending, and rotation. This means the spine can be in a vast number of configurations at any given moment. But only a narrow subset of these will result in efficient, stable crawling.
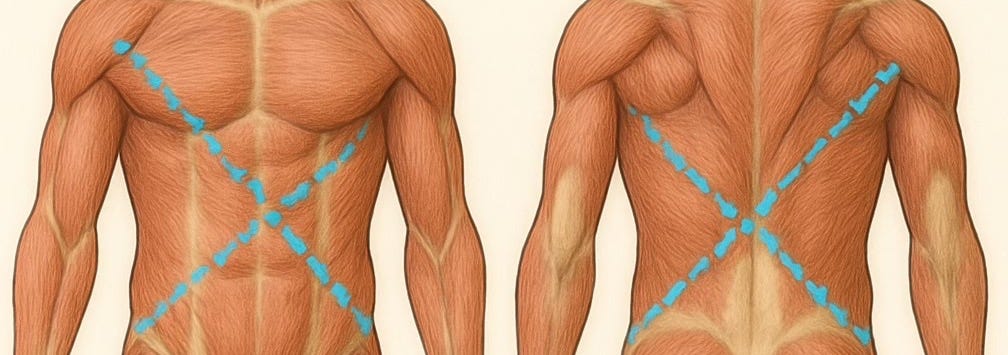
To move and stabilize the spine in useful patterns, every muscle between the hips and the shoulders needs to cooperate. The deep stabilizers of the spine (such as the multifidus and transverse abdominis) fire at precise times when stiffness is needed. Many of the larger muscles organize into chains that fire in diagonal patterns across the front and back of the body - these include the glutes, lats and spinal erectors in the back, and the pectorals and obliques in the front. These diagonal chains create a dynamic bracing system that stabilizes the torso while transmitting force efficiently from the ground to the body.
The nervous system coordinates this muscle activity by using reflexive neural structures in the spinal cord. For example, the crossed extensor reflex links flexion of one leg to extension on the other. You can easily feel this: if you actively lift one knee toward your chest, the opposite leg will reflexively extend.
This reflex is part of a broader class of neural circuits called central pattern generators (CPGs). These produce rhythmic locomotive movements like crawling or walking without input from the brain. The advantage of reflexive control is that it operates far more quickly and efficiently than control which depends on participation from the higher centers of the nervous system.
Quadrupedal versus bipedal gait
The neural and muscular patterns used in crawling also appear in walking and running. Each relies on cross-lateral coordination between the arms and legs, controlled by central pattern generators (CPGs) in the spine. But there are important differences that help explain why humans benefit from occasional crawling, even though our primary mode of locomotion is bipedal. The main distinction is that walking demands less muscular work and coordination from the body's largest, strongest, and centrally located muscles.
In walking, trunk muscle activation drops to very low levels because the vertical spine position provides stability for free. The hip extensors work significantly less because the calf muscles take over almost half the work of forward propulsion. And the shoulder muscles are free to relax almost completely, while in crawling they are working hard to support the body.
Further, crawling requires the arms to move in coordination with the legs, but in walking the arms are free to move out of sync with the locomotive rhythm. This is because CPGs in humans have a slightly weaker connection to the legs than in quadrupeds, freeing the arms to operate independently when necessary for activities like carrying or throwing.
The cumulative result is that walking requires less work from the large muscles in the middle of the body and less coordination between them. This is why crawling remains a valuable practice—it "reminds" the nervous system how to activate and coordinate the body’s most powerful muscles in the most fundamental and useful patterns of movement.
Interestingly, the need to integrate the large powerful muscles into locomotor patterns reappears in sprinting. When we sprint, the shoulders must move in rhythm